惯性-语义的三维对象检测场景表示0Jingming Dong � Xiaohan Fei � Stefano Soatto加州大学洛杉矶分校视觉实验室,洛杉矶,加利福尼亚州900950摘要0我们描述了一个使用视频和惯性传感器(加速度计和陀螺仪)...
”视觉-惯性-语义 对象检测器 视频和惯性传感器 对象存在的持久表示“ 的搜索结果
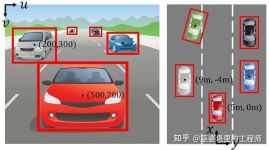
我们提出了一种方法来填充一个未知的环境与模型,以前看到的对象,放置在一个欧氏参考系,推断因果关系和在线使用单目视频以及惯性传感器。我们实现的系统返回一个稀疏的点云的场景,是可见的,但没有被识别为以前...
加速度计:加速度计---我们可以把它想作一个圆球在一个方盒子中。假定这个盒子不在重力场中或者其他任何会影响球的位置的场...这种力量通常被称为惯性力。在这个模型中,加速度计是通过间接测量力对一个墙面的作用来测
点击上方“AI算法修炼营”,选择加星标或“置顶”标题以下,全是干货一、本系列概述本系列旨在对前一阶段学习vins-mono开源框架的总结。结合暑假秋招之前报名的深蓝学院的《从零开始手写V...
图形模型126(2023)101172一种改进的半合成视觉-惯性里程数据集SamSchofield,Andrew Bainbridge-Smith,Richard Green新西兰坎特伯雷大学计算机科学与软件工程系A R T I C L E I N F O保留字:视觉惯性里程计半...
访问数据和文档:https://github.com/AaltoVision/ADVIOADVIO:一个用于视觉惯性里程计的Santiago Cortés1[0000− 0001− 7886− 7841]、Arno Solin 1[0000− 0002− 0958−7886]、Esa Rahtu 2[0000− 0001− 8767...





语义地图使用一组语义上有意义的对象来表示环境。这种表示具有存储效率、更模糊、信息更丰富,从而促进了在高度非结构化、被gps拒绝的环境中大规模自主和获取可操作信息。在这封信中,我们提出了一个集成的系统,它...





作者:小张Tt | 来源:3D视觉工坊在公众号「3D视觉工坊」后台,回复「原论文」可获取论文pdf和代码链接。添加微信:dddvisiona,备注:三维测量,拉你入群。文末附行业细分群。本文提出了一种新颖的归一化设备坐标...
14809AKB-48:一个真实世界的铰接对象知识库Liu Liu Wenqiang Xu Haoyuan Fu Sucheng Qian Qiaojiangjun Yu Yang Han CewuLu<$ Shanghai Jiaotong University{liuliu1993,vinjohn,simon-fuhaoyuan,qiansucheng,...


而场景理解是指更高层 的语义相关的量的估计,包括目标检测和语义分割这类训练数据包含语义标签的任务[ 1], 如图1.1所示。环境感知在自动驾驶中起着重要的作用,因为环境感知模块位于整个自动 驾驶系统控制算法的最...
随着计算机技术和电气电子技术的进步,机器人在制造业、医疗、教育、服务业等领域得到广泛应用。正如图1.1所示,机器人在汽车、电子、食品等制造业中得到广泛应用,可以完成物品装配、危险物的搬运与喷涂、精密焊接...


作者:一杯红茶 | 来源:计算机视觉工坊在公众号「3D视觉工坊」后台...本文将高级语义信息隐式地嵌入到检测和描述过程中来提取全局可靠的特征,即他们设计了一个语义感知检测器,能够从可靠的区域(如建筑物、交通车...


推荐文章
- 手写一个SpringMVC框架(有助于理解springMVC) 侵立删_springmvc可以用来写安卓后端吗-程序员宅基地
- 线性判别分析LDA((公式推导+举例应用))_lda推导-程序员宅基地
- C# 结构体(Struct)精讲_c# struct-程序员宅基地
- 支付宝Wap支付你了解多少?_阿里wap支付-程序员宅基地
- Java计算器编写,实现循环输入_java简易计算器可使用户多次输入-程序员宅基地
- 【多维Dij+DP】牛客小白月赛75 D-程序员宅基地
- Android之内存优化与OOM-程序员宅基地
- Azure Machine Learning - 视频AI技术_azure ai 視頻索引器-程序员宅基地
- 个人知识管理软件使用感受-程序员宅基地
- WWDC2019 ------深入理解App启动_wwdc app启动-程序员宅基地